开始前准备
- 第一次调试必须拆掉全部螺旋桨,机架固定在桌面上,身边不要站人。
- 如果手边有烟雾保护器或限流电源,优先使用;这样能更早发现短路或接反。
新手说明
这篇是 9 寸无人机的接线和调试记录。图片很多,但真正重要的是先做无桨上电、自检、收发确认,再做电机方向和编号核对,最后才允许装桨。
1. 不要在无人机未锁定的情况下关闭遥控器,否则无人机会失控,有极大危险!!!
2. 第一次调试的过程中不要安装螺旋桨,不要安装螺旋桨,不要安装螺旋桨
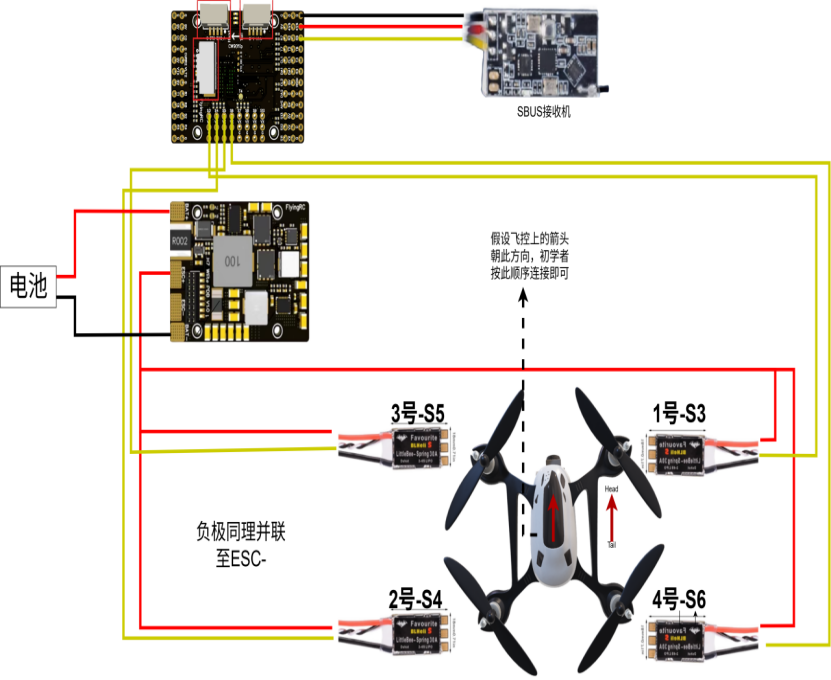
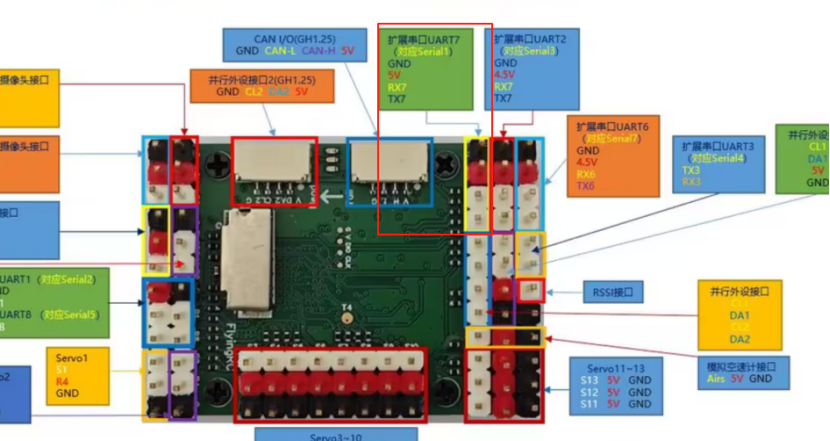
右上角电机插s3 左下角s4 左上角s5 右下角s6
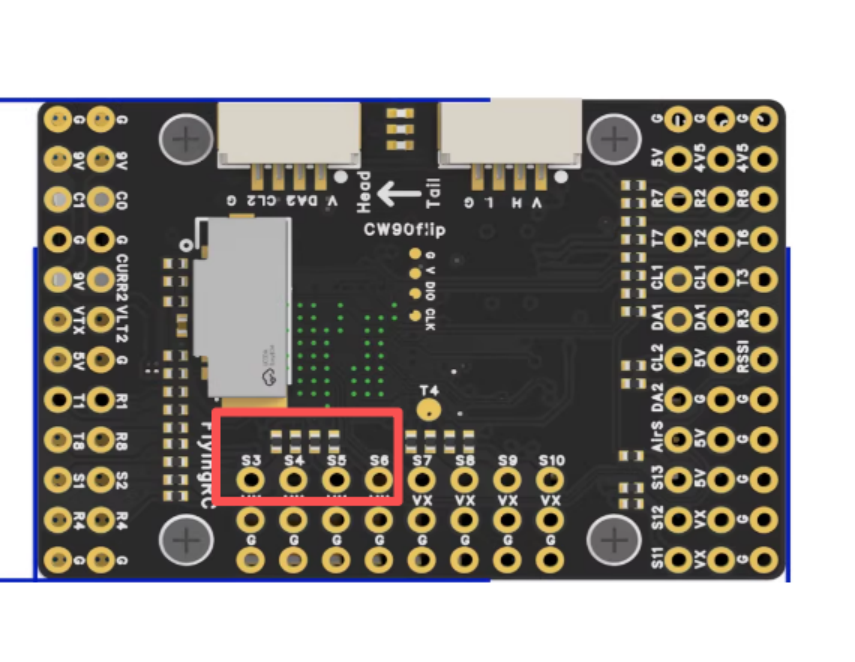
图解说明:这张图对应“第一次调试的过程中不要安装螺旋桨,不要安装螺旋桨,不要安装螺旋桨”这一步。先拆桨,再核对飞控朝向、电机编号和端口映射,任何试转都不要带桨。
飞控购买链接 淘宝链接
官方文档 【金山文档 | WPS云文档】 FlyingRC H7Wlite MK1 说明书
https://kdocs.cn/l/cv92R2Om3jGj
l ESC:Electronic Speed Controller(电子调速器)
n 如果使用的是四合一电调,则电调接飞控的ESC接口
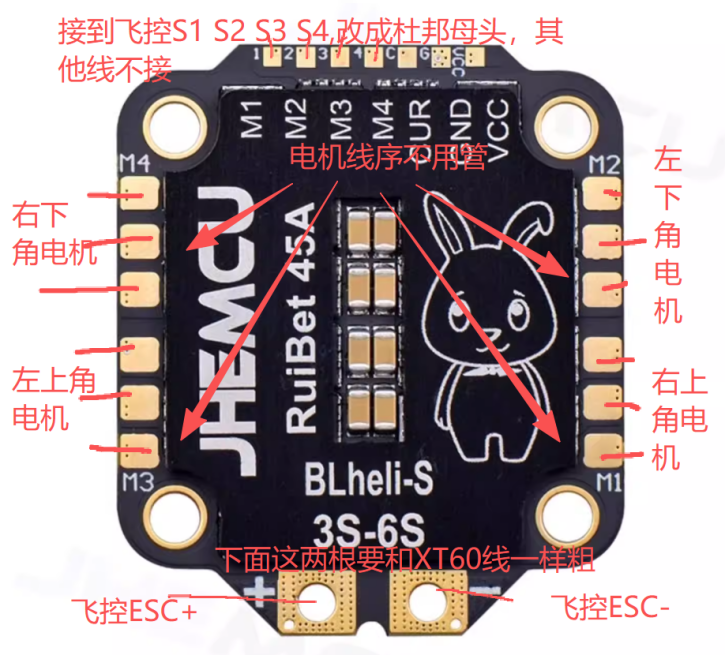
图解说明:这张图对应“如果使用的一路电调,则四路电调分别连接风扇后,将四路电调并联接到飞控上”这一步。先拆桨,再核对飞控朝向、电机编号和端口映射,任何试转都不要带桨。
n 如果使用的一路电调,则四路电调分别连接风扇后,将四路电调并联接到飞控上
一路电调链接https://item.taobao.com/item.htm?id=790282709206&mi_id=0000wnrzeU569oZOPWDvNxpj3202fJWlwcXzJVPw5TJKqvU&spm=tbpc.boughtlist.suborder_itemtitle.1.53662e8dmBWNtv&sku_properties=31309%3A426253839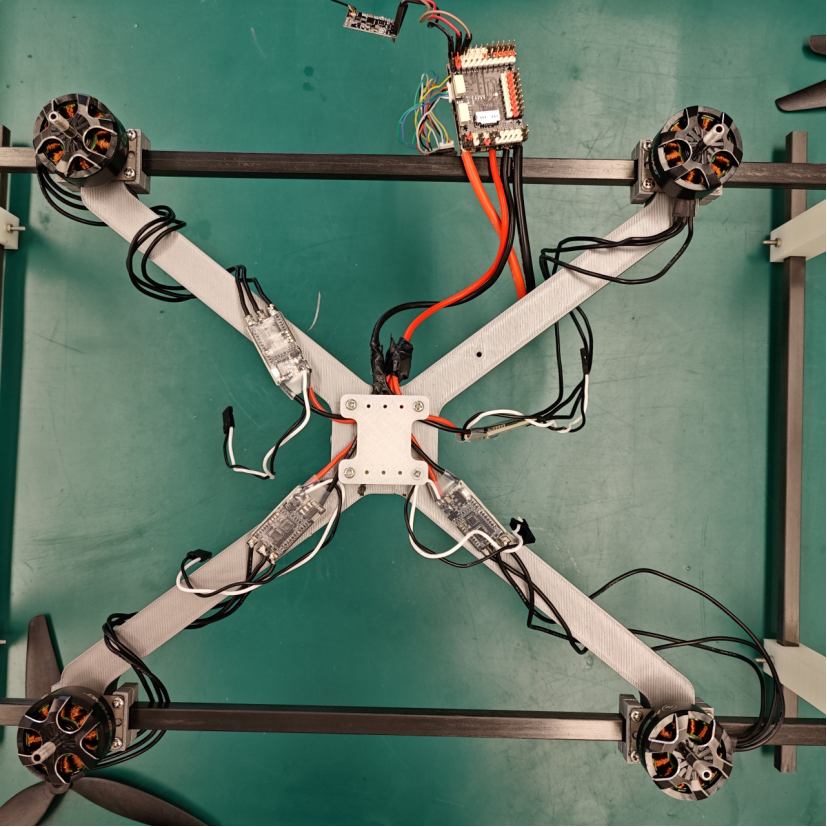
图解说明:这张图对应“如果使用的一路电调,则四路电调分别连接风扇后,将四路电调并联接到飞控上”这一步。先拆桨,再核对飞控朝向、电机编号和端口映射,任何试转都不要带桨。
n 右上角是1 左上角是3 电机顶部黑色对角 白色对角
图解说明:这张图对应“如果使用的一路电调,则四路电调分别连接风扇后,将四路电调并联接到飞控上”这一步。先拆桨,再核对飞控朝向、电机编号和端口映射,任何试转都不要带桨。
图解说明:这张图对应“如果使用的一路电调,则四路电调分别连接风扇后,将四路电调并联接到飞控上”这一步。先拆桨,再核对飞控朝向、电机编号和端口映射,任何试转都不要带桨。
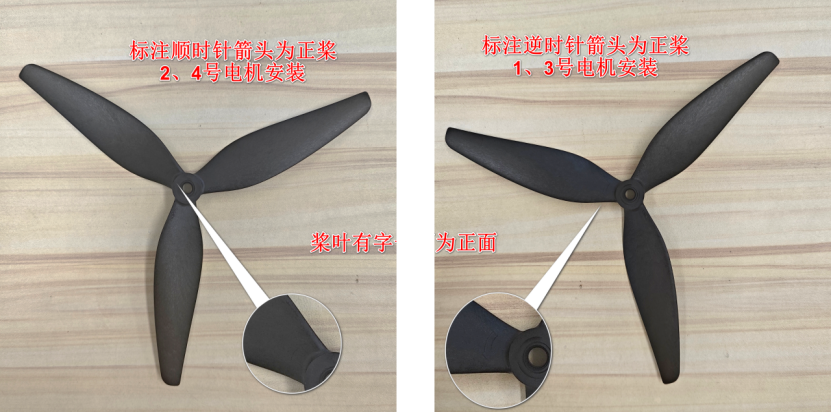
仅针对于正向安装螺旋桨(大部分情况)观察桨叶迎风方向,少数反装或导致需保证升力的方向
下载并安装软件:
https://firmware.ardupilot.org/Tools/MissionPlanner/MissionPlanner-1.3.76.msi
l 刷机过程如果有问题,重新拔插或者重启软件即可
l 务必不要安装桨叶进行刷机
图解说明:这张图对应“第一次运行:清除参数 右上角不需要连接”这一步。先拆桨,再核对飞控朝向、电机编号和端口映射,任何试转都不要带桨。
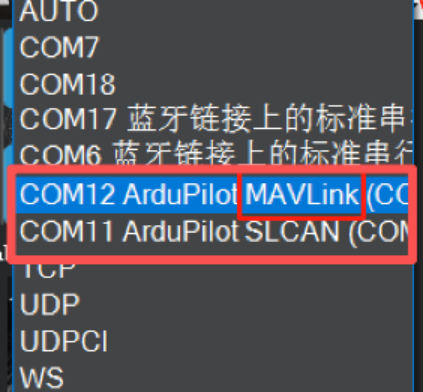
插上以后可以看一下右上角有没有两个com引脚
(MAVLINK AND SLCAN),不需要点连接
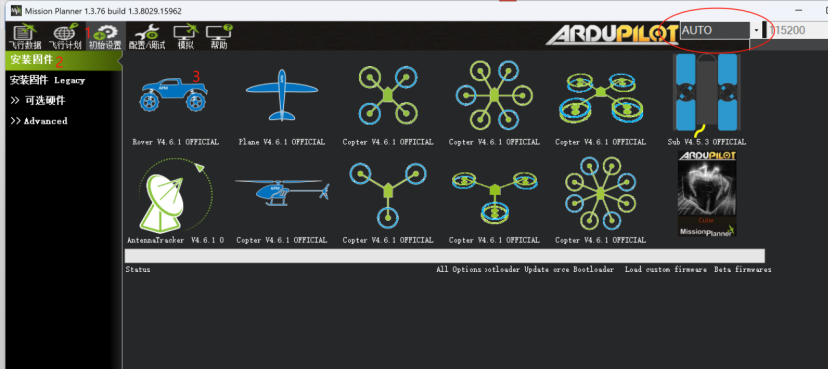
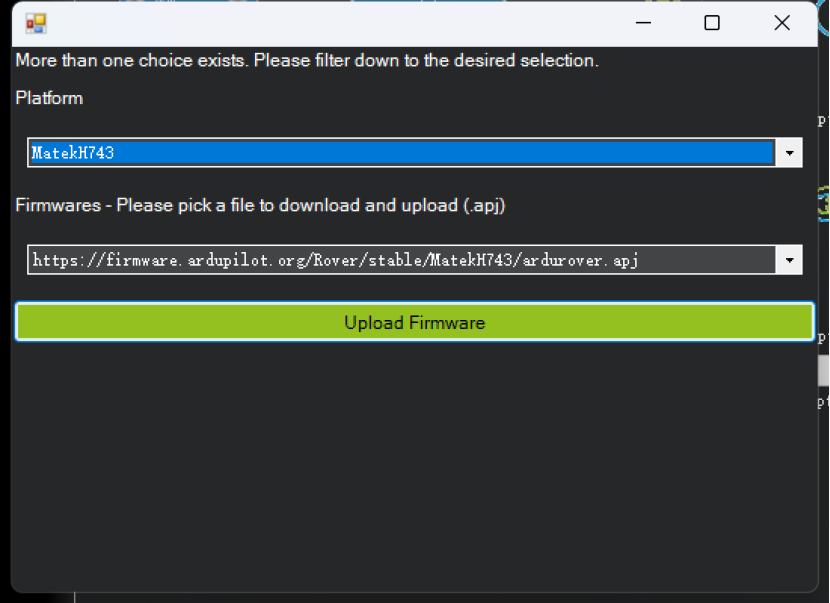
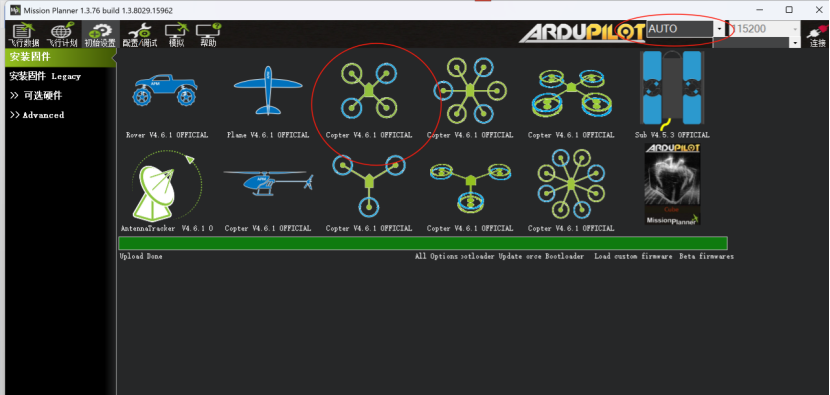
刷入车固件
图解说明:这张图对应“( MAVLINK AND SLCAN ) , 不需要点连接”这一步。路径、端口号和参数要按你自己的环境填写,不要整段照抄。
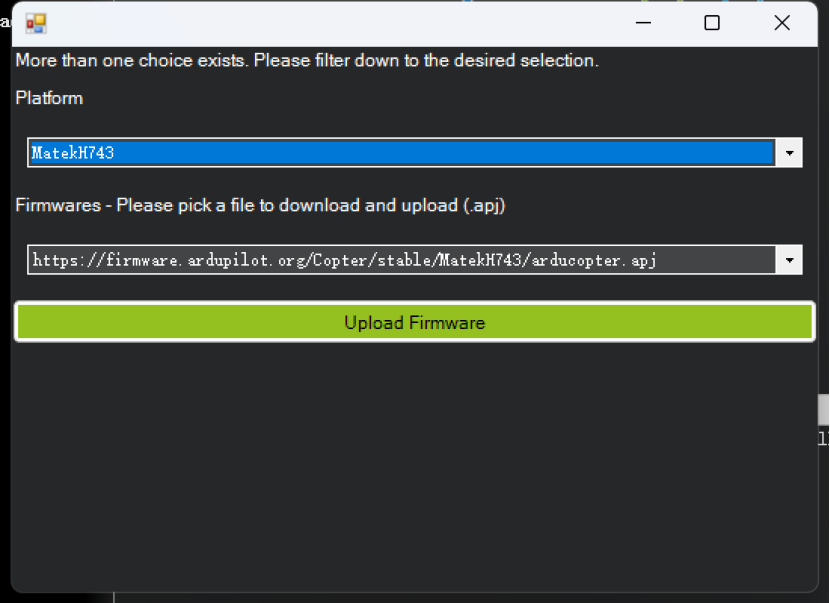
参数应该都会自动选择
图解说明:这张图对应“参数应该都会自动选择”这一步。先确认当前点到的是文中对应入口,再继续下一步。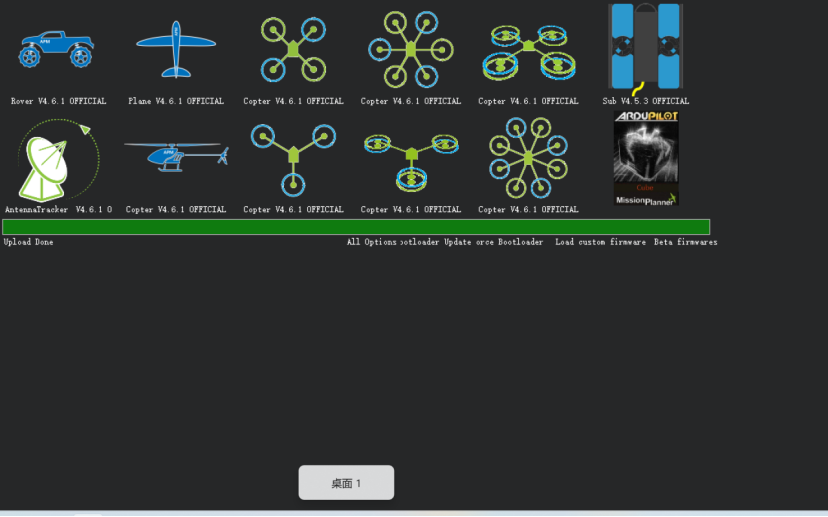
图解说明:这张图对应“参数应该都会自动选择”这一步。先确认当前点到的是文中对应入口,再继续下一步。
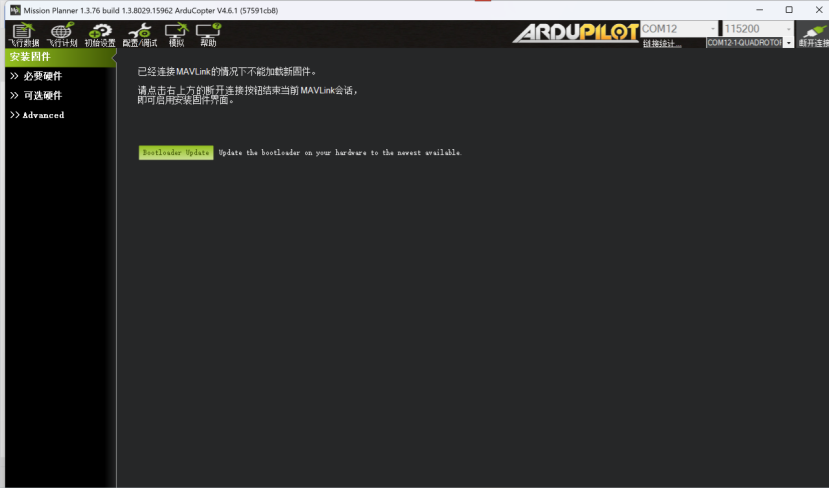
刷入完成
图解说明:这张图对应“安装多旋翼固件”这一步。先确认当前点到的是文中对应入口,再继续下一步。
如果下图界面参数空白,则可以尝试重启软件或重新拔插
图解说明:这张图对应“安装多旋翼固件”这一步。先确认当前点到的是文中对应入口,再继续下一步。
选择带MAVLink的串口,点击连接

图解说明:这张图对应“选择带 MAVLink的串口,点击连接”这一步。先确认当前点到的是文中对应入口,再继续下一步。
连接成功后的界面如下
图解说明:这张图对应“连接成功后的界面如下”这一步。先确认当前点到的是文中对应入口,再继续下一步。

图解说明:这张图对应“、机架类型的设置”这一步。先确认当前点到的是文中对应入口,再继续下一步。
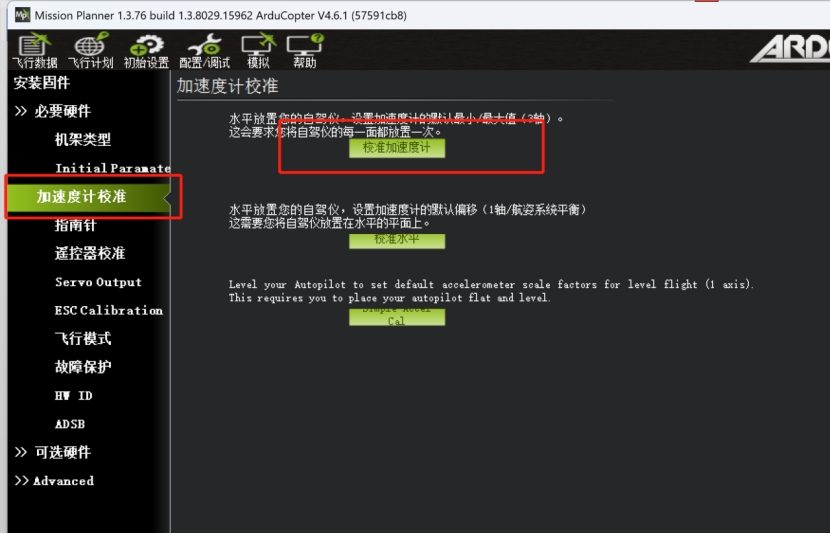
图解说明:这张图对应“加速度计的校准”这一步。执行前先拆桨或脱开负载,避免设备突然动作。
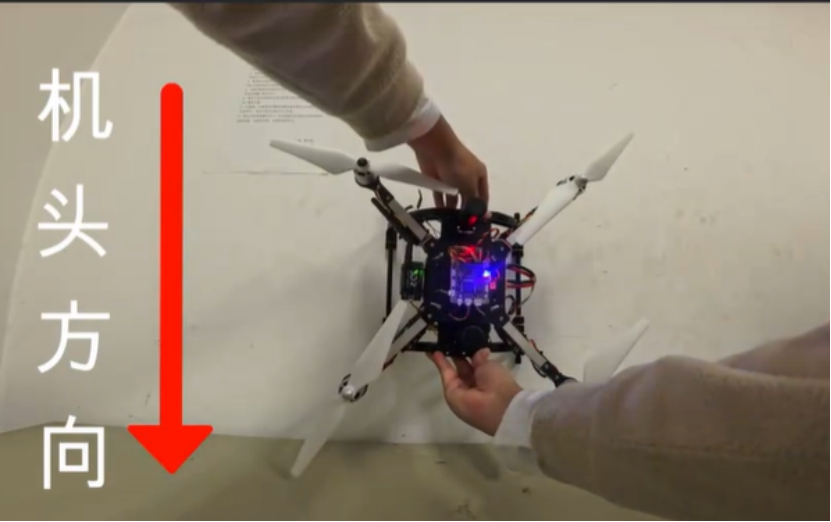
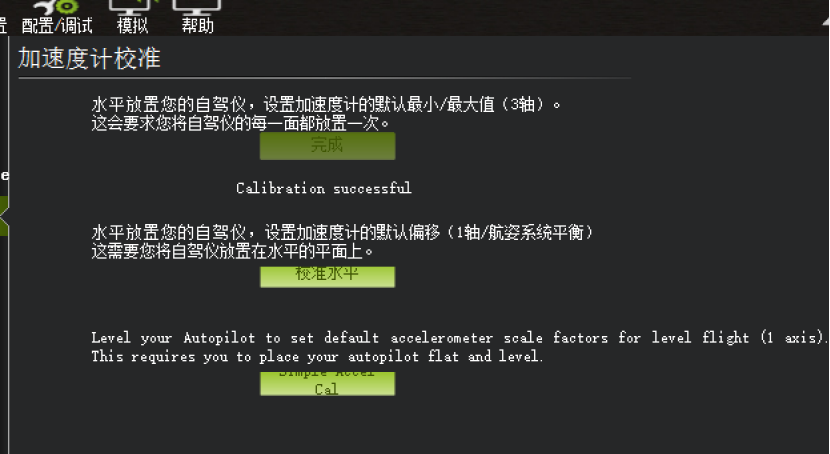
接下来,根据指示将无人机置于不同的方位来进行加速度计的校准,每次转动到对应位置点击完成按钮(测试的过程中请将机头方向朝前,电源线朝前)
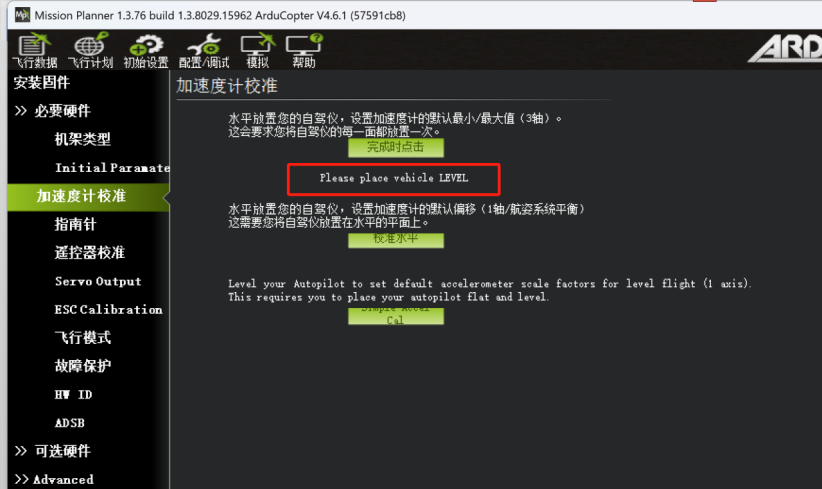
图解说明:这张图对应“接下来,根据指示将无人机置于不同的方位来进行加速度计的校准 ,每次转动到对应位置点击完成按钮 ( 测试的过程...”这一步。执行前先拆桨或脱开负载,避免设备突然动作。
按照提示分别将无人机进行到对应的位置
水平 LEVEL

图解说明:这张图对应“接下来,根据指示将无人机置于不同的方位来进行加速度计的校准 ,每次转动到对应位置点击完成按钮 ( 测试的过程...”这一步。执行前先拆桨或脱开负载,避免设备突然动作。
向左 LEFT 左转90度

图解说明:这张图对应“接下来,根据指示将无人机置于不同的方位来进行加速度计的校准 ,每次转动到对应位置点击完成按钮 ( 测试的过程...”这一步。执行前先拆桨或脱开负载,避免设备突然动作。
向右 RIGHT 右转90度

图解说明:这张图对应“接下来,根据指示将无人机置于不同的方位来进行加速度计的校准 ,每次转动到对应位置点击完成按钮 ( 测试的过程...”这一步。执行前先拆桨或脱开负载,避免设备突然动作。
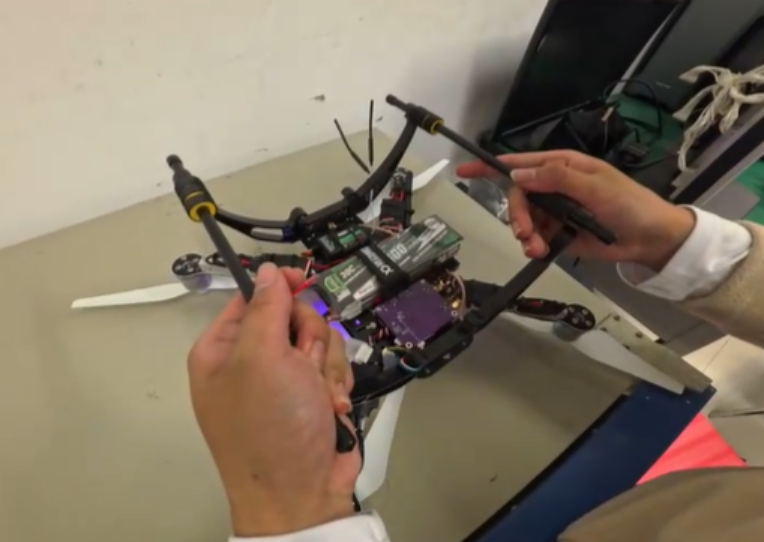
向下 NOSEDOWN 下转90度
图解说明:这张图对应“接下来,根据指示将无人机置于不同的方位来进行加速度计的校准 ,每次转动到对应位置点击完成按钮 ( 测试的过程...”这一步。执行前先拆桨或脱开负载,避免设备突然动作。
向上 NOSEUP 上转90度

图解说明:这张图对应“遥控器校准”这一步。执行前先拆桨或脱开负载,避免设备突然动作。
反转 UPSIDEDOWN 翻转180度
图解说明:这张图对应“遥控器校准”这一步。执行前先拆桨或脱开负载,避免设备突然动作。
校准完成
图解说明:这张图对应“遥控器校准”这一步。执行前先拆桨或脱开负载,避免设备突然动作。
完成校准水平
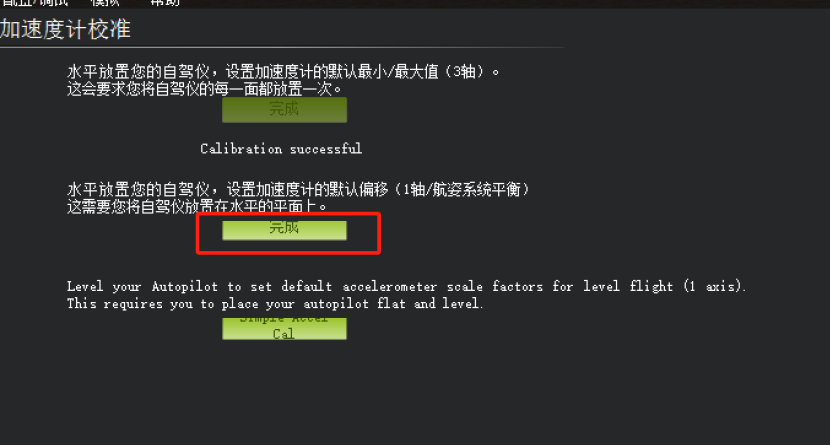
图解说明:这张图对应“遥控器校准”这一步。执行前先拆桨或脱开负载,避免设备突然动作。
首先插上接收机,和遥控器配对好
新版10路遥控器选择在下方菜单中选择开始对码,接收机按下按钮让绿灯快闪

图解说明:这张图对应“新版 10 路遥控器选择在下方菜单中选择开始对码,接收机按下按钮让绿灯快闪”这一步。执行前先拆桨或脱开负载,避免设备突然动作。
图解说明:这张图对应“新版 10 路遥控器选择在下方菜单中选择开始对码,接收机按下按钮让绿灯快闪”这一步。执行前先拆桨或脱开负载,避免设备突然动作。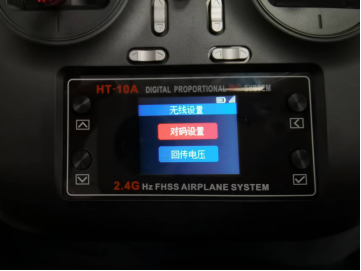
图解说明:这张图对应“新版 10 路遥控器选择在下方菜单中选择开始对码,接收机按下按钮让绿灯快闪”这一步。执行前先拆桨或脱开负载,避免设备突然动作。
图解说明:这张图对应“新版 10 路遥控器选择在下方菜单中选择开始对码,接收机按下按钮让绿灯快闪”这一步。执行前先拆桨或脱开负载,避免设备突然动作。
图解说明:这张图对应“新版 10 路遥控器选择在下方菜单中选择开始对码,接收机按下按钮让绿灯快闪”这一步。执行前先拆桨或脱开负载,避免设备突然动作。
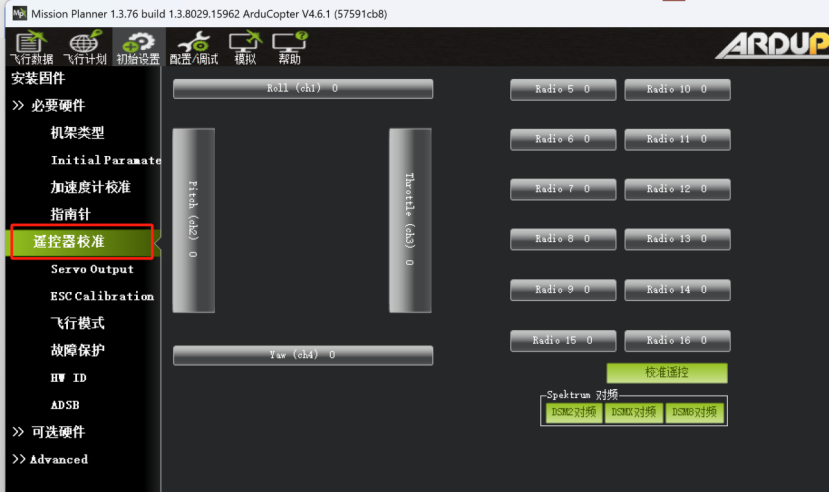
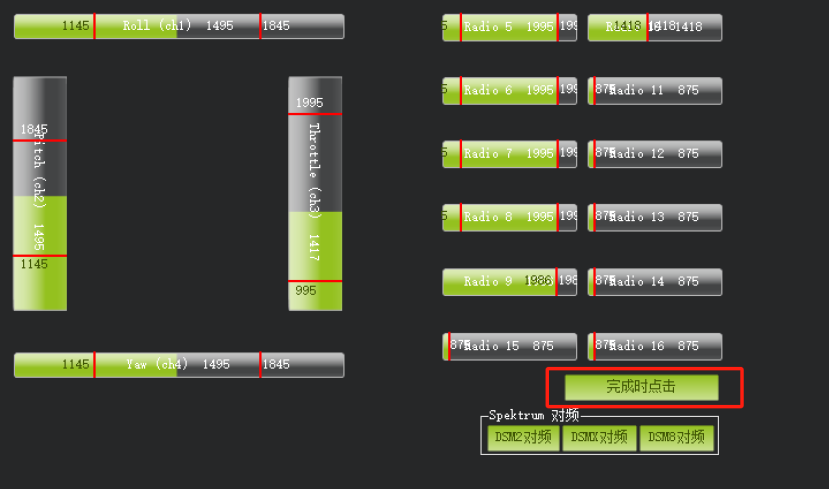
点下校准遥控,将遥控器上的四个拨杆和两个摇杆往各个可用行程方向都推一遍,在软件的界面可以看到,最大行程会被自动记录
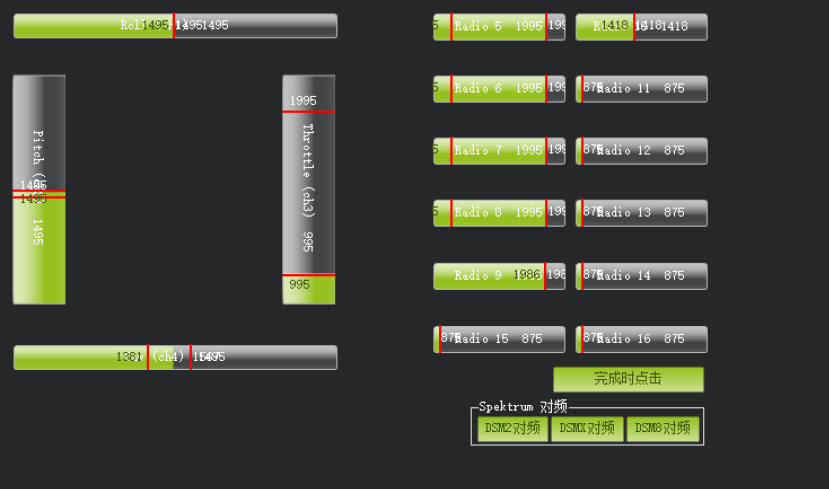
图解说明:这张图对应“新版 10 路遥控器选择在下方菜单中选择开始对码,接收机按下按钮让绿灯快闪”这一步。执行前先拆桨或脱开负载,避免设备突然动作。
校准完成后点击
图解说明:这张图对应“校准完成后点击”这一步。执行前先拆桨或脱开负载,避免设备突然动作。
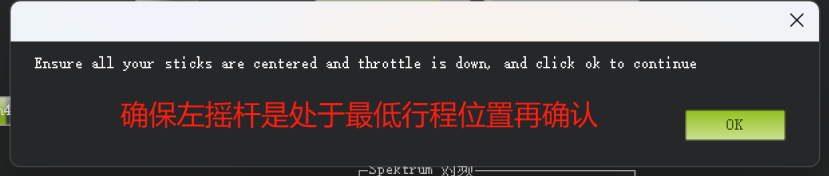
图解说明:这张图对应“校准完成后点击”这一步。执行前先拆桨或脱开负载,避免设备突然动作。
根据我们的选择,将Motor1、2、3、4分别和Channel3、4、5、6对应

图解说明:这张图对应“根据我们的选择,将 Motor1、2、3、4分别和Channel3、4、5、6对应”这一步。执行前先拆桨或脱开负载,避免设备突然动作。
对于一路电调,ESC Type选择Normal即可
对于四路电调 选择DShot300 切换不要点开始
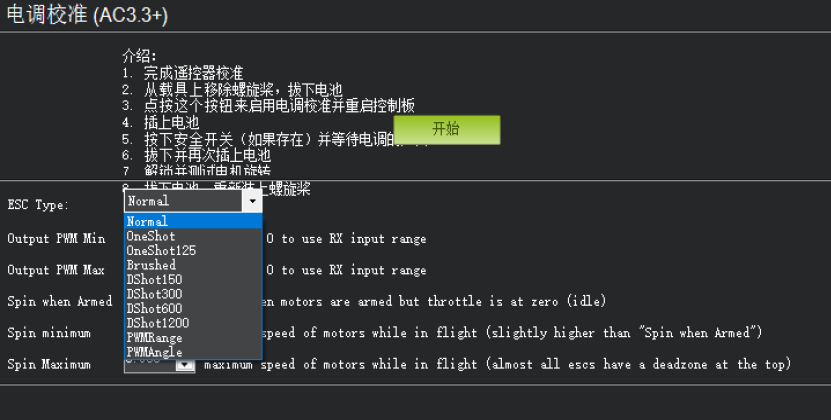
图解说明:这张图对应“对于四路电调 选择 DShot300 切换不要点开始”这一步。先拆桨,再核对飞控朝向、电机编号和端口映射,任何试转都不要带桨。
按下图进行设置。希望了解详细可自行查阅。(点击开始拔掉串口 接上电池 等待(唱歌结束) 最后在连接上USB口)这一步是用来调整电机行程的,一般不需要点击
这一步正常情况不需要点击开始
下方的参数直接修改即可,不需要保存或确认 一般设置第一个解锁空转速度为0.05,最小速度也调整为0.05
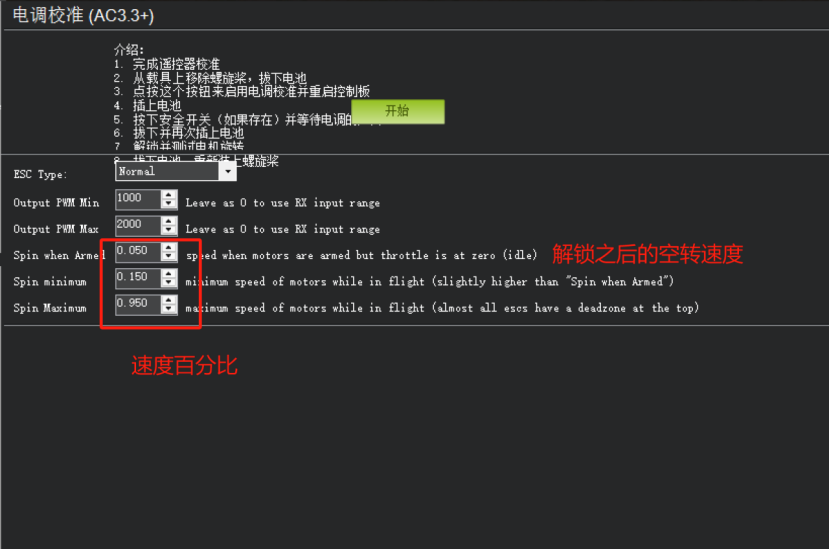
图解说明:这张图对应“下方的参数直接修改即可,不需要保存或确认 一般设置第一个解锁空转速度为 0.05 ,最小速度也调整为 0.0...”这一步。先拆桨,再核对飞控朝向、电机编号和端口映射,任何试转都不要带桨。
对应遥控器SWA5,三挡设置可选,默认为自稳模式,暂时不使用其他模式
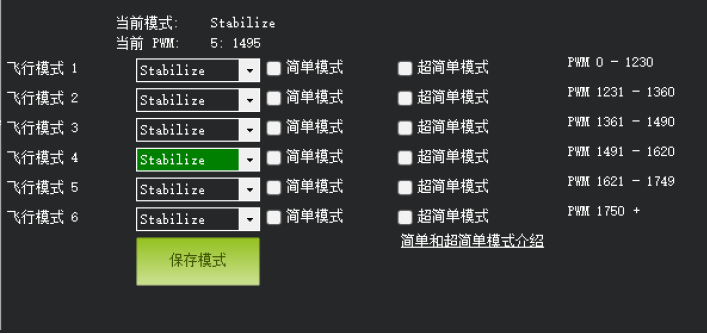
图解说明:这张图对应“对应遥控器 SWA5 ,三挡设置可选 ,默认为自稳模式,暂时不使用其他模式”这一步。先拆桨,再核对飞控朝向、电机编号和端口映射,任何试转都不要带桨。
例如:所用电池最大截止电压为25.2V,放电截止电压为18V,则低电量保护我们设置一个大于18的值,如20,一般设置为电池满电压的80%
电台改为Disabled
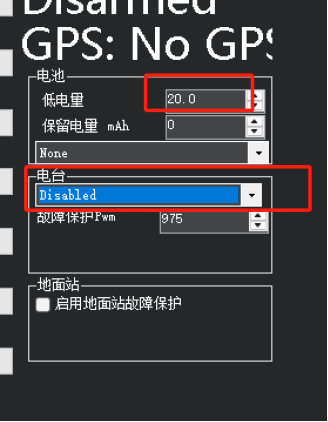
图解说明:这张图对应“例如:所用电池最大截止电压为 25.2V ,放电截止电压为 18V ,则低电量保护我们设置一个大于 18 的...”这一步。先把当前画面和正文步骤对上,再继续往后操作。
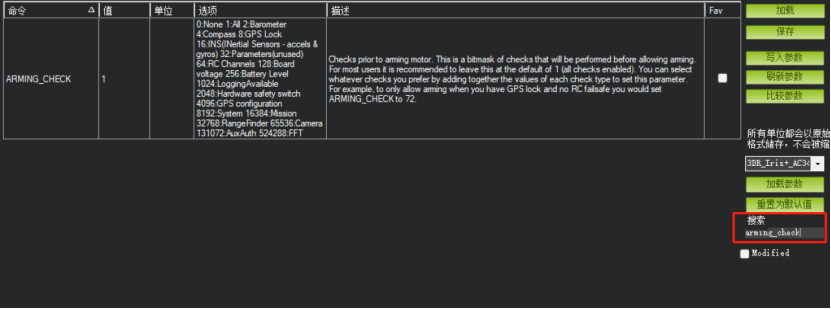
使用菜单栏的“配置/调试”,选择“全部参数”进入设置
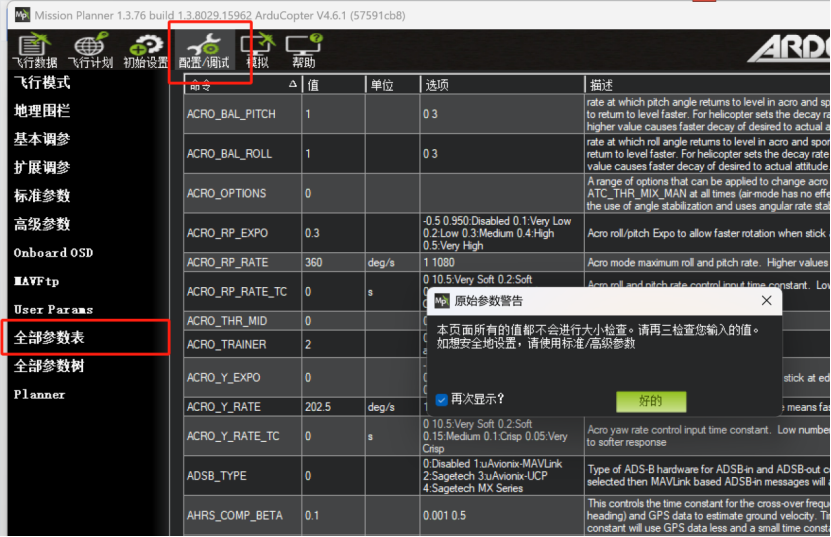
图解说明:这张图对应“使用菜单栏的 “配置 / 调试”,选择“全部参数”进入设置”这一步。如果你的版本界面略有不同,优先找同名按钮或菜单项即可。
要修改的参数:
arming_check=0
BATT_VOLT_MULT 21
BATT_AMP_PERVLT 80
COMPASS_ENABLE = 0

图解说明:这张图对应“使用菜单栏的 “配置 / 调试”,选择“全部参数”进入设置”这一步。如果你的版本界面略有不同,优先找同名按钮或菜单项即可。
例如,对于arming_check参数,搜索得到参数
图解说明:这张图对应“点击 “写入参数””这一步。先确认当前点到的是文中对应入口,再继续下一步。
取消所有勾选项
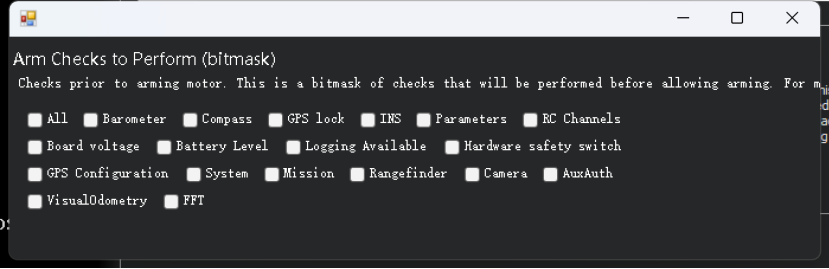
图解说明:这张图对应“点击 “写入参数””这一步。先确认当前点到的是文中对应入口,再继续下一步。
参数变为0

图解说明:这张图对应“点击 “写入参数””这一步。先确认当前点到的是文中对应入口,再继续下一步。
点击“写入参数”
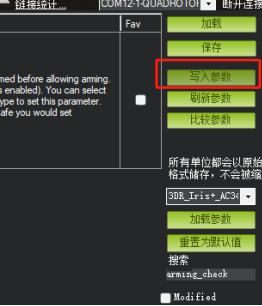
图解说明:这张图对应“点击 “写入参数””这一步。先确认当前点到的是文中对应入口,再继续下一步。
一切完成后,接上电池,遥控器左摇杆往右下角推即可解锁尝试
1、2号应当为逆时针,3、4号应当为顺时针,方向不对看下面PS怎么解决
测试的时候ABCD如下图对应1234
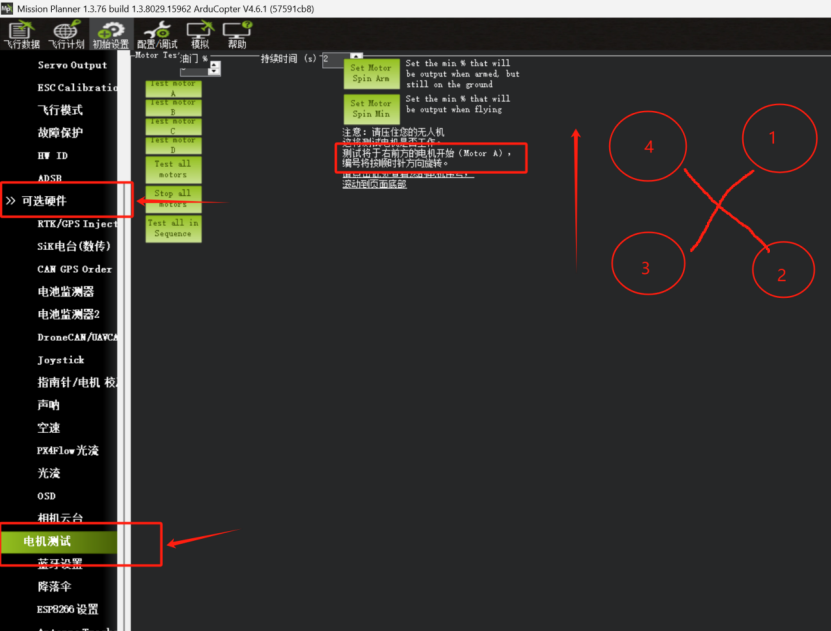
图解说明:这张图对应“2号应当为逆时针,3、4号应当为顺时针 ,方向不对看下面 PS怎么解决”这一步。先拆桨,再核对飞控朝向、电机编号和端口映射,任何试转都不要带桨。
很抱歉,您提供的内容似乎不完整。请提供需要续写的文章内容,我将尽力帮助您完成续写。
1.如果GPS和飞控没有安装在无人机的重心时,需要对以下参数进行调整
飞控和GPS偏离重心 | |
IMU及GPS相对于重心偏移(数字可以为负数): 前方 = 正 X,右方 = 正 Y,下方 = 正 Z | |
单位:M 如果只有10CM 就填0.1 | |
IMU(飞控)对于重心的偏移 | INS_POS1_X |
INS_POS1_Z | |
INS_POS2_X | |
INS_POS2_Z | |
GPS相对于重心的偏移 | GPS_POS1_X |
GPS_POS1_Z |
2.飞控方向
输入AHRS_ORIENTATION,按照对应的方式翻转,一般适用于飞控倒置情况,调整完观察罗盘方向是否正确
3.四合一电调快速调整转向(不需要重新电焊)
电调的协议 | SERVO_BLH_OTYPE | 5 | 5是DSHOT300 重启 |
电调的协议 | SERVO_DSHOT_ESC | 2 | BLHELI_S |
用于反向旋转方向错误的电机 | SERVO_BLH_RVMASK | 选择旋转方向错误的电机 |
一对一电调方向错误必须对调焊接两根线即可
4.飞控刷betaflisht
https://micoair.cn/docs/fei-kong-gu-jian-shao-lu-jiao-cheng-Ardupilot-PX4-Betaflight-INAV
https://docs.speedybee.cn/plane/ardupilot/settings/esc/esc-dshot.html
图解说明:这张图对应“飞控刷 betaflisht”这一步。先拆桨,再核对飞控朝向、电机编号和端口映射,任何试转都不要带桨。