开始前准备
- 准备可传数据的 Type-C 线、独立供电适配器、Windows 电脑,以及要写入的正确镜像文件。
- 如果目标是写入 eMMC,默认会覆盖板上原有系统和数据;有需要先备份。
新手说明
这篇主要是给 RK3588 / Radxa 一类开发板做底层刷机。新手不要只照着图片点按钮,先确认你现在是在“进入 Maskrom”“识别设备”还是“写入镜像”这三个阶段中的哪一步。
刷固件
https://docs.radxa.com/rock5/rock5b/low-level-dev/install-os/rkdevtool_emmc
1. 进入 Maskrom 模式
① : 按住 Maskrom 按键
② : 使用电源适配器给主板上电
③ : 松开 Maskrom 按键
④ : 使用数据线连接主板的 OTG 端口和电脑的 USB 端口
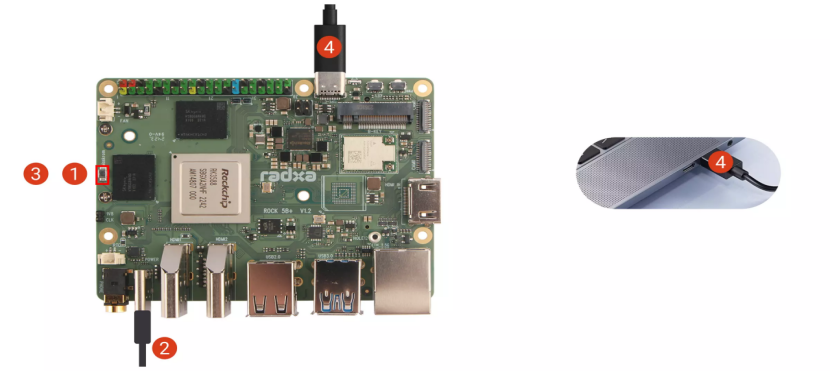
图解说明:这张图对应“④ : 使用数据线连接主板的 OTG 端口和电脑的 USB 端口”这一步。重点看按键、供电和 OTG 连接顺序,电脑端识别到设备后再继续写入。
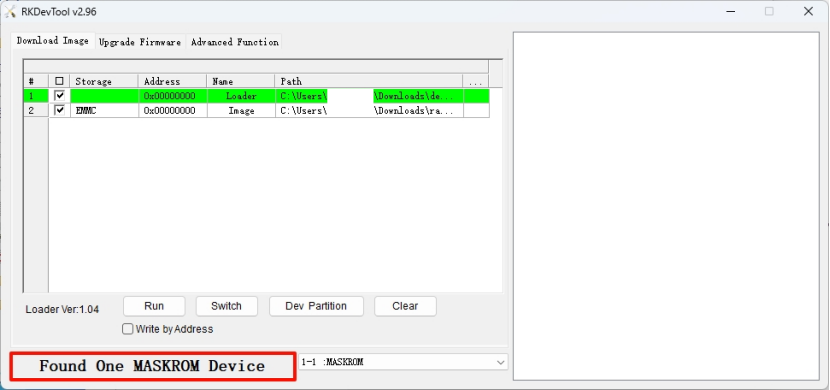
若主板进入 Maskrom 模式,软件左下角会显示 Found One MASKROM Device。
图解说明:这张图对应“④ : 使用数据线连接主板的 OTG 端口和电脑的 USB 端口”这一步。重点看按键、供电和 OTG 连接顺序,电脑端识别到设备后再继续写入。
2.安装系统到eMMC
在 Windows 平台,我们可以打开 RKDevTool 工具,然后按照以下步骤安装系统到 eMMC 上。
① : 选择主板对应的 Loader 文件
② : 选择主板对应的系统镜像
③ : 选择 eMMC 选项作为系统存储介质
④ : 勾选 Write by Address 选项
⑤ : 点击 RUN 选项执行所有操作
⑥ : 可以通过该界面观察操作进度
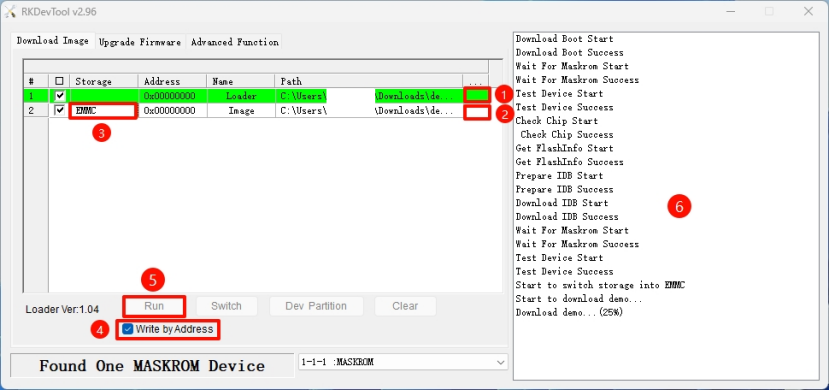
图解说明:这张图对应“⑤ : 点击 RUN 选项执行所有操作”这一步。先确认当前点到的是文中对应入口,再继续下一步。
断开主板与 PC 的连接,然后重新插拔电源,系统会自动从 eMMC 模块中启动。
40pin引脚
https://docs.radxa.com/rock5/rock5b/hardware-design/hardware-interface?versions=ROCK+5B%2B
关闭KDE
https://zhuanlan.zhihu.com/p/653433883
关闭休眠
https://blog.csdn.net/zeandon/article/details/145910893
禁用锁屏

图解说明:这张图对应“禁用锁屏”这一步。先把当前画面和正文步骤对上,再继续往后操作。
显示Npu消耗
watch -n 0.01 sudo cat /sys/kernel/debug/rknpu/load
v4l2-ctl --list-devices
Type-C供电

图解说明:这张图对应“Type-C供电”这一步。先把当前画面和正文步骤对上,再继续往后操作。
编辑 GDM3 配置文件
执行 sudo nano /etc/gdm3/daemon.conf ,在 [daemon] 部分添加 / 修改:
[daemon]AutomaticLoginEnable = true # 启用自动登录
AutomaticLogin = 你的用户名 # 填实际要自动登录的用户名
当前账户获取所有权限
sudo usermod -a -G dialout $USER
pin口说明书
https://docs.radxa.com/rock5/rock5b/hardware-design/hardware-interface
串口测试
https://docs.radxa.com/rock5/rock5b/getting-started/interface-usage/pin-40-test
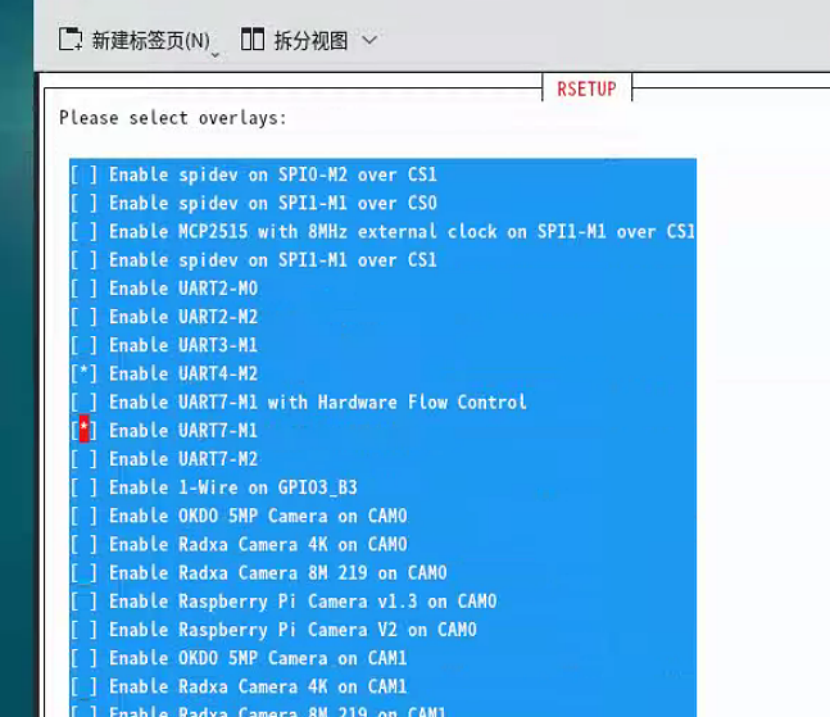
rsetup
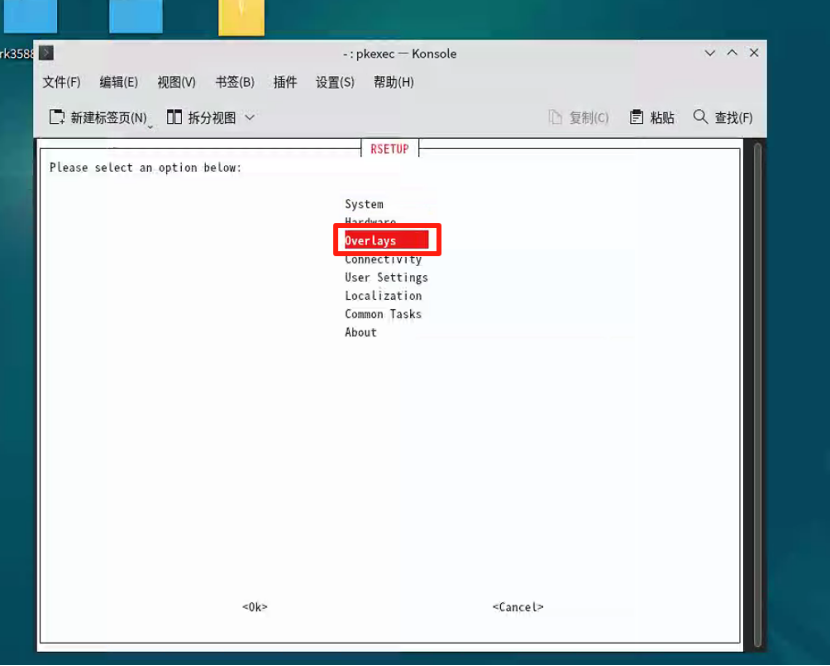
图解说明:这张图对应“按空格键选择”这一步。先确认当前点到的是文中对应入口,再继续下一步。
按空格键选择
uart4 m2 tx23 rx19 yaw电机
uart7 m1 rx 11 tx15 pitch电机
uart2 m2 tx 36 rx38

图解说明:这张图对应“按空格键选择”这一步。执行前先拆桨或脱开负载,避免设备突然动作。
图解说明:这张图对应“按空格键选择”这一步。执行前先拆桨或脱开负载,避免设备突然动作。
开机启动
图解说明:这张图对应“按空格键选择”这一步。执行前先拆桨或脱开负载,避免设备突然动作。
nano ~/.config/autostart/pipper_code_auto_start.desktop
然后将以下内容复制粘贴进去:
[Desktop Entry]
Type=Application
Exec=bash -c 'echo "radxa" | sudo -S bash bash /home/radxa/Desktop/python_code/piper_sdk-master/piper_sdk/can_activate.sh can0 1000000 && sleep 1 && /home/radxa/Desktop/python_code/.venv/bin/python /home/radxa/Desktop/python_code/piper_sdk-master/piper_sdk/sbus_to_ttl_to_arm.py'
Hidden=false
NoDisplay=false
X-GNOME-Autostart-enabled=true
Name=PipperCodeAutoStart
Comment=Start Pipper Code Script Automatically
保存方法:按 Ctrl+O 写入文件,按 Enter 确认文件名,再按 Ctrl+X 退出编辑器。
pip3 install python-can
https://github.com/airockchip/rknn-toolkit2/tree/master
在rk3588上安装rknn-toolkit2
pt模型转换为rknn
RKNN Ultralytics YOLOv11 | Radxa Docs
sudo apt install python3.11-venv
source /home/nuc/jack_311_venv/bin/activate
pip config set global.index-url https://pypi.mirrors.ustc.edu.cn/simple/
pip install ultralytics